Beam Search vs A-Star Search#
Introduction#
Beam search and A-star are two important search algorithms. Both are used to find the shortest path between 2 points in a graph. Let’s explain the differences between these 2 algorithms and compare their performance.
We’ll start by defining the graph that we need to search. This is just a grid with some obstacles (1’s) and some open lanes (0’s). The goal is to find the shortest path between the start and end points.
# Define a larger grid with obstacles
grid = [
[0, 0, 0, 1, 0, 0, 0, 0, 1, 0],
[0, 1, 0, 1, 0, 1, 1, 0, 1, 0],
[0, 1, 0, 0, 0, 0, 1, 0, 1, 0],
[0, 0, 0, 1, 1, 0, 1, 0, 0, 0],
[1, 1, 0, 0, 0, 0, 1, 0, 1, 0],
[0, 1, 1, 1, 1, 0, 0, 0, 1, 0],
[0, 0, 0, 0, 1, 0, 1, 1, 1, 0],
[0, 1, 1, 0, 0, 0, 0, 0, 1, 0],
[0, 0, 0, 0, 0, 1, 1, 1, 0, 0],
[0, 1, 1, 1, 0, 0, 0, 0, 0, 0]
]
We’ll define a visualize_grid function to help us visualize the grid.
Show code cell source
import matplotlib.pyplot as plt
import matplotlib.colors as mcolors
import numpy as np
def visualize_grid(grid, start, goal, a_star_path=None, beam_search_path=None,
beam_search_paths=None, beam_width=None, ax=None, path_color=None):
rows, cols = len(grid), len(grid[0])
grid_visual = np.zeros((rows, cols, 3))
for r in range(rows):
for c in range(cols):
if grid[r][c] == 1:
grid_visual[r, c] = [0, 0, 0] # Black for obstacles
else:
grid_visual[r, c] = [1, 1, 1] # White for free spaces
if a_star_path:
for r, c in a_star_path:
grid_visual[r, c] = [0, 0, 1] # Blue for A* path
a_star_steps = len(a_star_path) - 1
else:
a_star_steps = None
if beam_search_path:
path_color_rgb = mcolors.to_rgb(path_color) if path_color else [1, 0, 0]
for r, c in beam_search_path:
grid_visual[r, c] = path_color_rgb # Use the provided color or default to red
beam_search_steps = len(beam_search_path) - 1
else:
beam_search_steps = None
if beam_search_paths:
colors = plt.cm.rainbow(np.linspace(0, 1, len(beam_search_paths)))
for path, color in zip(beam_search_paths, colors):
for r, c in path:
grid_visual[r, c] = color[:3] # Use rainbow colors for multiple beam search paths
if ax is None:
fig, ax = plt.subplots()
ax.imshow(grid_visual)
ax.text(start[1], start[0], 'Start', color='green', fontsize=8, ha='center', va='center', weight='bold')
ax.text(5.5, 5, 'Tricky', color='purple', fontsize=8, ha='center', va='center', weight='bold')
ax.text(goal[1], goal[0], 'End', color='orange', fontsize=8, ha='center', va='center', weight='bold')
if beam_width is not None:
title = f"Beam Width: {beam_width}"
else:
title = ""
if beam_search_paths:
title += f"\n{len(beam_search_paths)} paths"
if a_star_steps is not None:
title += f"\nA* Steps: {a_star_steps}"
if beam_search_steps is not None:
title += f"\nBeam Search Steps: {beam_search_steps}"
ax.set_title(title)
ax.grid(False)
if ax is None:
plt.show()
And then we’ll visualize the grid.
visualize_grid(grid, start=(0, 0), goal=(9, 9))
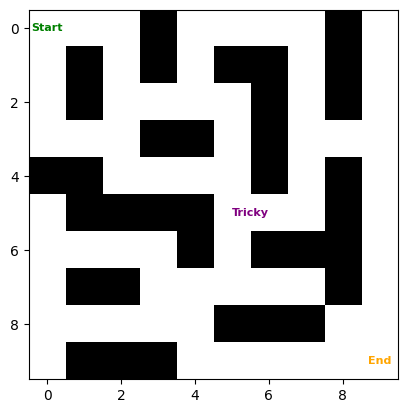
There’s a bit of a tricky part in this grid. At the center, you need to go backwards (away from the end point) to reach the final point. This tests the ability of the algorithms to backtrack and find the shortest path.
Algorithm: A* Search#
We’ll start by implementing the A* search algorithm. This algorithm is a combination of Dijkstra’s algorithm and a heuristic function. The heuristic function is used to estimate the distance between the current node and the end node. The algorithm then selects the node with the smallest cost to expand next.
The typical heuristic function used is the Manhattan distance (because we only allow up, down, left, and right movements). We’ll use this heuristic function in our implementation.
The algorithm is typically implemented using a priority queue. We’ll use the heapq library in Python to implement the priority queue.
The algorithm is as follows:
Initialize the start node with a cost of 0 and add it to the priority queue.
While the priority queue is not empty:
Pop the node with the smallest cost from the priority queue.
If the node is the end node, return the path.
Otherwise, expand the node and add its neighbors to the priority queue.
If the priority queue is empty, return None.
import heapq
# A* search function
def a_star(start, goal):
rows, cols = len(grid), len(grid[0])
# Heuristic function (Manhattan distance)
def heuristic(a, b):
return abs(a[0] - b[0]) + abs(a[1] - b[1])
# Initialize the open set (priority queue)
open_set = []
heapq.heappush(open_set, (0, start))
# Dictionaries to store the cost of getting to each node and the path
came_from = {}
g_score = {start: 0}
while open_set:
_, current = heapq.heappop(open_set)
if current == goal:
# Reconstruct the path
path = []
while current in came_from:
path.append(current)
current = came_from[current]
path.append(start)
return path[::-1] # Reverse path to get from start to goal
# Neighbors (up, down, left, right)
neighbors = [(current[0] + dx, current[1] + dy) for dx, dy in [(0, 1), (1, 0), (0, -1), (-1, 0)]]
for neighbor in neighbors:
x, y = neighbor
if 0 <= x < rows and 0 <= y < cols and grid[x][y] == 0:
tentative_g_score = g_score[current] + 1
if neighbor not in g_score or tentative_g_score < g_score[neighbor]:
came_from[neighbor] = current
g_score[neighbor] = tentative_g_score
f_score = tentative_g_score + heuristic(neighbor, goal)
heapq.heappush(open_set, (f_score, neighbor))
return None # No path found
Run the algorithm by executing the following code:
# Run the algorithm
start = (0, 0)
goal = (9, 9)
# Run A* Search
a_star_path = a_star(start, goal)
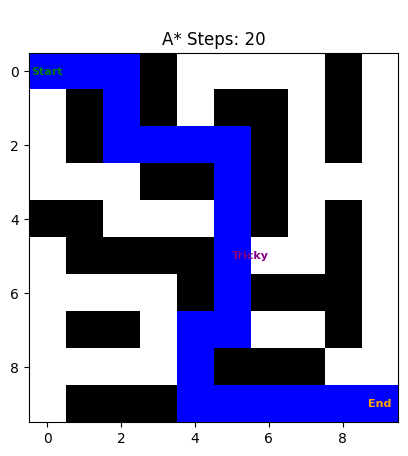
We see the algorithm is able to navigate the grid and find the shortest path. It gets to the end goal in 20 steps.
visualize_grid(grid, start=(0, 0), goal=(9, 9), a_star_path=a_star_path)
Algorithm: Beam Search#
Beam search is a simpler algorithm compared to A-star search. The algorithm has a parameter called beam_width which determines the number of nodes (or paths) kept open at each step, and the rest are pruned. Beam search is a breadth-first search algorithm that expands only a fixed number of top candidate nodes at each step, based on a scoring function (which could include a heuristic).
It is not guaranteed to find the optimal path like A*, but it is often used in contexts where finding a reasonable solution quickly is more important than guaranteeing the best solution.
The algorithm is as follows:
Initialize the start node with a cost of 0 and add it to the priority queue.
While the priority queue is not empty:
Pop the
beam_widthnodes with the smallest cost from the priority queue.If any of the nodes is the end node, return the path.
Otherwise, expand the nodes and add their neighbors to the priority queue.
If the priority queue is empty, return None.
# Beam search function with heuristic
def beam_search(start, goal, beam_width=2):
rows, cols = len(grid), len(grid[0])
# Heuristic function (Manhattan distance)
def heuristic(a, b):
return abs(a[0] - b[0]) + abs(a[1] - b[1])
# Initialize the beam with the starting point (f_score, current position, path)
beam = [(heuristic(start, goal), start, [start])]
# List to store all paths explored in each iteration
all_paths = [beam] # Store initial state
while beam:
next_candidates = []
for _, current, path in beam:
if current == goal:
return (path, all_paths) # Return the successful path and all paths explored
# Generate neighbors (up, down, left, right)
neighbors = [(current[0] + dx, current[1] + dy) for dx, dy in [(0, 1), (1, 0), (0, -1), (-1, 0)]]
for neighbor in neighbors:
x, y = neighbor
if 0 <= x < rows and 0 <= y < cols and grid[x][y] == 0 and neighbor not in path:
new_path = path + [neighbor]
# f(n) = g(n) + h(n)
f_score = len(new_path) + heuristic(neighbor, goal)
next_candidates.append((f_score, neighbor, new_path))
# Prune to keep only the top beam_width candidates
beam = heapq.nsmallest(beam_width, next_candidates)
# Add current state of the beam to all_paths for each iteration
all_paths.append(beam)
return (None, all_paths) # If no path found, return None and all paths explored
def visualize_beam_search_final(grid, start, goal, beam_widths):
fig, axes = plt.subplots(1, len(beam_widths), figsize=(5*len(beam_widths), 5))
if len(beam_widths) == 1:
axes = [axes]
for i, beam_width in enumerate(beam_widths):
final_path, _ = beam_search(start, goal, beam_width)
visualize_grid(grid, start, goal, beam_search_path=final_path, beam_width=beam_width, ax=axes[i])
plt.tight_layout()
plt.show()
The beam_width parameter is a hyperparameter that needs to be tuned. A larger beam_width will explore more nodes and may find the shortest path, but it will also be slower. A smaller beam_width will explore fewer nodes and may not find the shortest path, but it will be faster.
When the beam_width is set to 1, the algorithm is equivalent to Dijkstra’s algorithm. When the beam_width is set to the number of nodes in the graph, the algorithm is equivalent to breadth-first search.
We’ll look at the performance of the beam search algorithm with different values of beam_width. We’ll start with a beam_width of 1 and increase it to 9.
We see that the algorithm is not able to find the shortest path with a beam_width of 1. It returns a path of 22 steps (+2 compared to A-star).
However, as we increase the beam_width, the algorithm is able to find the shortest path. With a beam_width of 9, the algorithm is able to find the shortest path in 20 steps, which is the same as the A-star search algorithm.
# To visualize only the final paths for different beam widths
visualize_beam_search_final(grid, start=(0, 0), goal=(9, 9), beam_widths=[1, 5, 9])
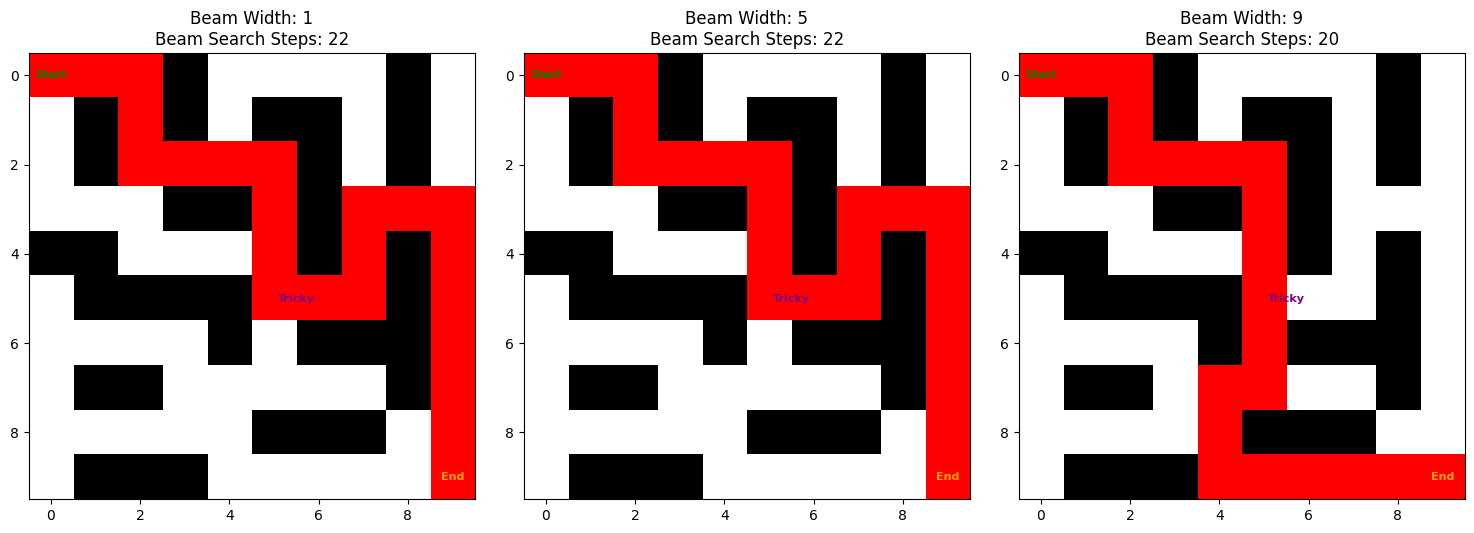
What is beam_width doing here? A smaller beam_width will explore fewer different paths. A larger beam_width will keep more promising options open. It may find the shortest path, but it will be slower.
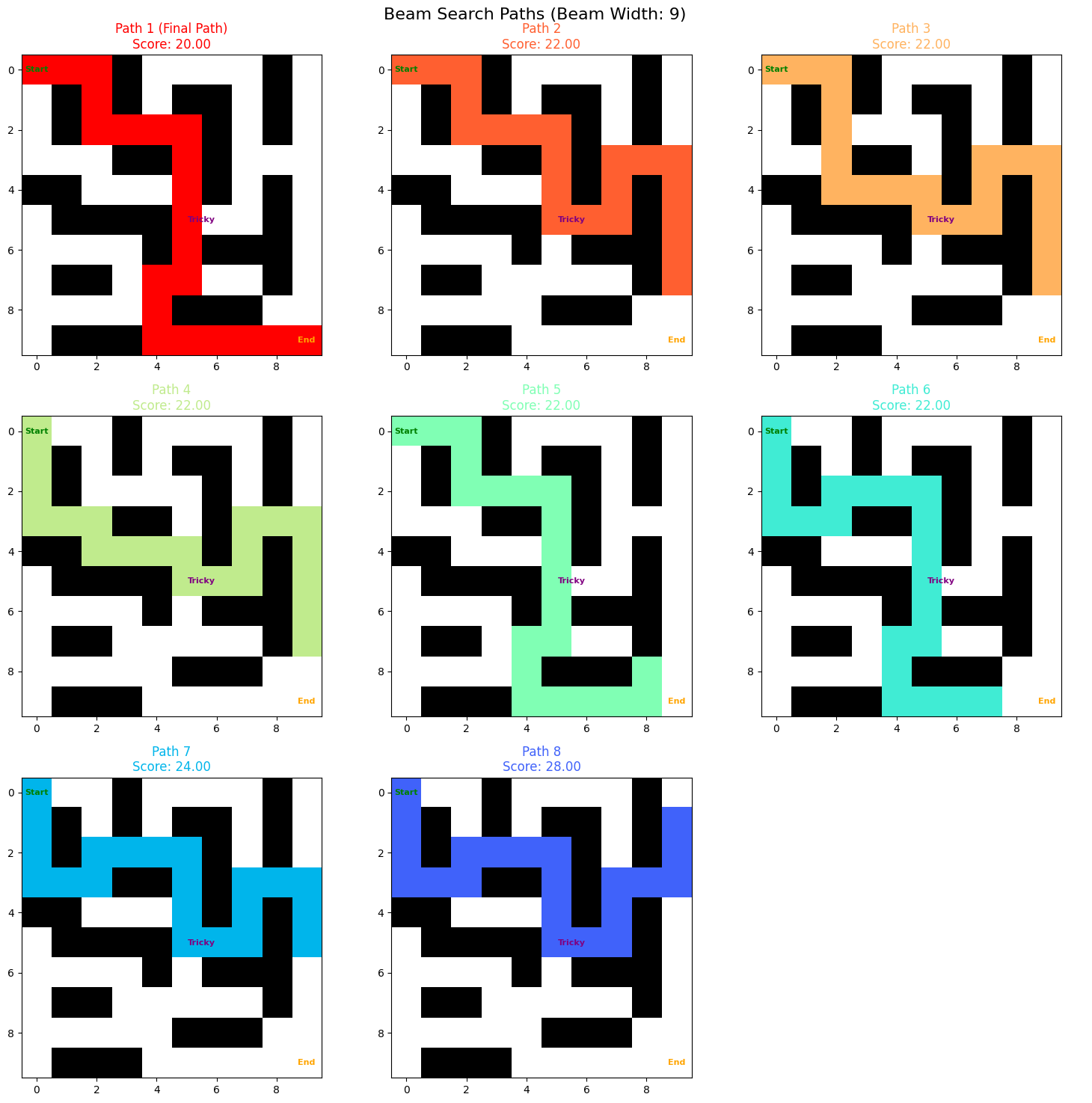
Let’s visualize all of the options that beam search is keeping open. When the beam_width is set to 9, we see that it’s keeping 9 different paths open at each step. This is why it’s able to find the shortest path.
Show code cell source
def visualize_beam_search_all_paths(grid, start, goal, beam_width):
final_path, all_paths = beam_search(start, goal, beam_width)
# Get the paths from the last iteration
last_iteration_paths = all_paths[-1]
fig, axes = plt.subplots(3, 3, figsize=(15, 15))
axes = axes.flatten()
# Generate distinct colors for each path
colors = plt.cm.rainbow(np.linspace(0, 1, 9))
colors = colors[::-1] # Reverse the color order
for i, (score, _, path) in enumerate(last_iteration_paths[:9]): # Show up to 9 paths
color = mcolors.rgb2hex(colors[i][:3]) # Convert RGB to hex color code
visualize_grid(grid, start, goal, beam_search_path=path, beam_width=beam_width, ax=axes[i], path_color=color)
path_length = len(path) - 1 # Subtract 1 because the start node is included
score = score - 1 # Subtract 1 because the start node is included
if path == final_path:
axes[i].set_title(f"Path {i+1} (Final Path)\nScore: {score:.2f}", color=color)
else:
axes[i].set_title(f"Path {i+1}\nScore: {score:.2f}", color=color)
# If there are fewer than 9 paths, turn off the unused subplots
for i in range(len(last_iteration_paths), 9):
axes[i].axis('off')
plt.suptitle(f"Beam Search Paths (Beam Width: {beam_width})", fontsize=16)
plt.tight_layout()
plt.show()
# To visualize all paths for a specific beam width in a 3x3 grid
visualize_beam_search_all_paths(grid, start=(0, 0), goal=(9, 9), beam_width=9)